Alex Berg Home : Human Pose Estimation
Human Pose Estimation from Images
The goal of this work is to find the pose of humans in still images.
This is a difficult problem because of the wide variety in appearance
of people due to clothing, lighting, and, of course, pose. Dealing
with this variation while exploiting high level knowledge about what
people do and how they appear is an unsolved problem in computer
vision.
So far we have explored two main directions: techniques based on
exemplars, and based on a bottom up approach.
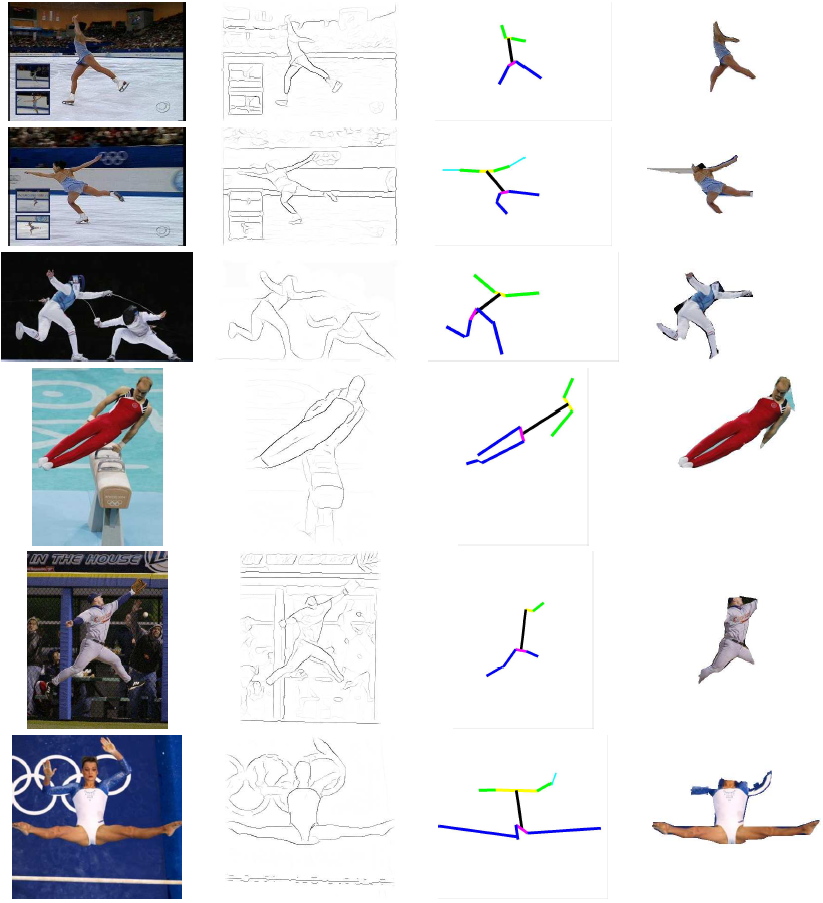
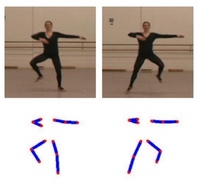 Skeletons taken from the nearest matching exemplar using geometric blur and warping for better alignment. Skeletons taken from the nearest matching exemplar using geometric blur and warping for better alignment.
| |
The exemplar based approach relies on modern computational
power to store many possible examples of the appearance of humans in
various poses, and requires a robust similarity measure (eg geometric blur based descriptors) to compare novel
images to stored exemplars. The skeleton associated with the best matching
exemplar is used for the novel image. An aligning transformation between
the exemplar and the novel image can be applied to the skeleton to improve accuracy. Video or motion information can be used when available. This approach has the advantage
that arbitrarily complex priors on pose and appearance can be handled
by simply sampling the possibilities. The disadvantage is that the
number of samples or exemplars may increase beyond a manageable level
as the range of possible appearances increases.Papers
|
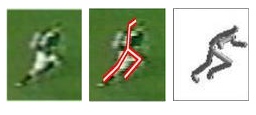 Skeleton taken from the nearest matching exemplar using an optical flow based descriptor (middle). Matching to a rendered 3d figure (right). Skeleton taken from the nearest matching exemplar using an optical flow based descriptor (middle). Matching to a rendered 3d figure (right). |
|
Finding the correspondence from parts of a model to
locations on an image. The locations are selected using a bottom up
approach starting with edge detection.
 Example pose estimations (click for larger version). Example pose estimations (click for larger version). | |
Our bottom up approach uses low level detectors based on
edges to find parts of an image that might be limbs. These are then
assembled into an estimate of the whole body configuration using
pairwise constraints and approximate integer quadratic programming as
in our work on shape matching and object
recognition. The IQP framework allows more general constraints
between body parts than can be modeled with traditional tree
structured models. The bottom up approach can provide better
localization than exemplar based approaches and can handle a wide
range of poses with lower computational and storage requirements, but
suffers when the low level limb detectors fail. (More from Xiaofeng's page.)
Papers
|
|
We are working to build a hybrid of these two approaches and apply
this to finding poses of humans in still images and video sequences.
Papers
| |
Finding human poses in still frames using exemplars and warping for fine alignment:
Video Based Motion Synthesis by Splicing and Morphing
[pdf]
[ps]
Gregory P. Mori,
Alexander C. Berg,
Alexei A. Efros,
Ashley Eden,
Jitendra Malik
U.C. Berkeley Technical Report UCB/CSD-4-1337, June 2004.
|
Finding human poses in video using exemplars based on optical flow:
Recognizing Action at a Distance
[pdf]
[ps]
Alexei A. Efros,
Alexander C. Berg,
Gregory P. Mori,
Jitendra Malik
International Conference on Computer Vision (ICCV) 2003,
Nice,
pp 726-733.
|
Finding human poses in still frames from the bottom up using approximate integer quadratic programming:
Recovering Human Body Configurations using Pairwise Constraints Between Parts
[pdf]
[ps]
Xiaofeng Ren,
Alexander C. Berg,
Jitendra Malik
International Conference on Computer Vision (ICCV) 2005, Beijing, pp. 824-831.
|
|